























ELS 4 Basic - Elektronische Leitspindelsteuerung
Die elektronische Leitspindel macht aus einer einfachen Drehmaschine eine Zyklen-Drehmaschine! Sie ersetzt das Getriebe komplett und treibt über einen oder zwei Schrittmotoren die X und Z-Achse der Drehbank an. Dadurch können beliebige Vorschübe und Gewindesteigungen auf Knopfdruck eingestellt und genau Positionen angefahren werden, eine Positionsanzeige (DRO) ist enthalten. Gewinde- Kegel oder Radiendrehen wird damit einfach wie nie, auch Zollgewinde und mehrgängige Gewinde kann die ELS, alles ohne Gewindeschneider auf der konventionellen Drehmaschine. Es ist sowohl 1- als auch 2-Achsbetrieb umschaltbar.
Genaue Produktbeschreibung auf der Seite Elektronische Leitspindelsteuerung ELS
Beispiele für den Anbau an verschiedene Drehmaschinen finden Sie unter Anbaubeispiele
Eigenschaften:
- Ersetzt das Getriebe komplett
- 1- oder 2-Achsbetrieb, Halb- oder Vollautomatisch, auch später auf 2-Achsbetrieb umschaltbar.
- Hochwertiges 4x20 LCD mit Hintergrundbeleuchtung
- Positionierungen auf 1/100 mm genau
- Drehzahlanzeige
- Umkehrspielausgleich
- Getriebe, Positionierung, Gewindeschneiden, Kegel, Radien, Schleifen u. v. a mehr
- Für Spindeldrehzahlen bis 3000 U/min bzw. 6000 U/min
- Leichter Anschluss auch über Standard-Ethernet-Patchkabel
- Anschluss für Encoder und 2 Schrittmotorendstufen (Z und X-Achse)
- Erweiterung für externes Bedienteil
- Stromversorgung über 12V-Steckernetzteil (nicht enthalten)
- Nachträgliche Softwareupdates über Mikro-SD-Card möglich
- Lebenslange kostenlose Softwareupdates
- Lieferung erfolgt mit gedrucktem 104-seitigem Deutschen Handbuch.
- Neue robuste Hardware
- Hochwertige IP65-Folientastatur
- JETZT NEU: Auch ein Handrad ist für die ELS4 Basic verfügbar!
Unterschied zu ELS4 PRO
- 12-Volt-Betrieb statt 24-Volt, aber die I/Os akzeptieren 24-Volt.
- 4x20 monochromes Punktmatrix-Display anstelle eines TFT-Farbdisplays mit 420x272 Pixeln.
- Kein 0-10V-Ausgang für die Spindelsteuerung.
- Kleines, platzsparendes, eloxiertes Aluminiumgehäuse
- Weniger Tasten für die Bedienung
Mögliche Drehzyklen der ELS:
- Getriebemodus Links und rechts
- Außendrehen
- Innendrehen
- Plandrehen
- Abstechen
- Gewindedrehen aller Gewindearten mit leicht einstellbarer Gewindesteigung, auch Zollgewinde
(auch mit einfacher oder Modifizierter Flankenzustellung)
Mögliche Gewindearten:- Außengewinde drehen
- Innengewinde drehen
- Mehrgängiges Gewinde
- Linksgewinde drehen
- Gewinde nachdrehen / Gewindereparatur
- Freistich drehen (nach DIN76)
- Kegeldrehen:
- Außenkegel drehen
- Innenkegel drehen
- Radiusdrehen
- Außenradius drehen Konvex und Konkav, elliptisch oder kreisförmig
- Innenradius drehen Konvex und Konkav, elliptisch oder kreisförmig
- Rille drehen
- Einstechen (f. Keiriemenscheiben u. a.)
- Bohren mit mehreren Zustellungen und einstellbarem Rückzug
- Schleifen und Stoßen
- Winkelmessung
- Positionsanzeige
Lieferumfang:
- 1 Stück Elektronische Leitspindel eingebaut in eloxiertem Aluminium-Gehäuse
Benötigtes Zubehör (nicht im Lieferumfang enthalten):
- 12V / 1A Netzteil (Steckernetzteil oder Hutschienennetzteil)
- Inkrementalencoder mit 400ppr
Ausführliche Informationen zur ELS4 finden Sie auf unserer INFOWEBSITE
Beispiele von Umbauten der Drehmaschinen finden Sie unter ANBAUBEISPIELE
Fotos von der ELS4 an Kundenmaschinen
ELS4 Pro an einer Wabeco D4000

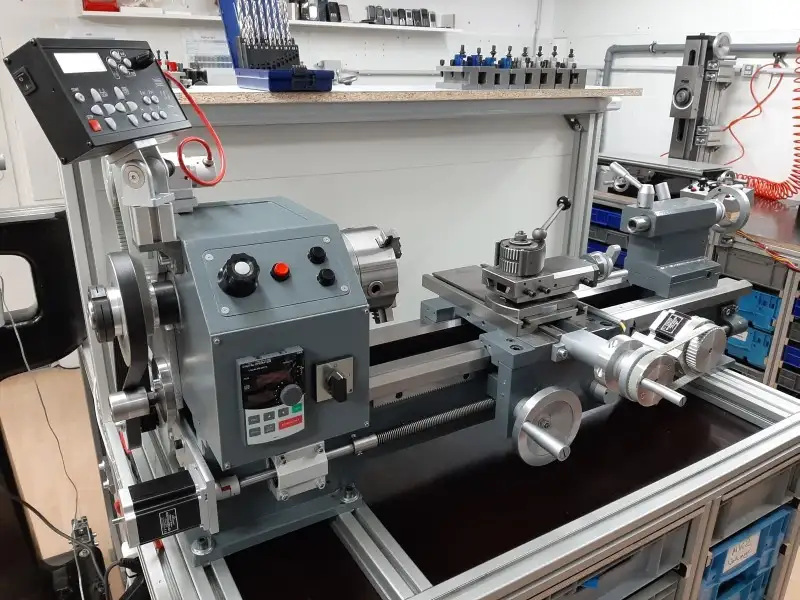
ELS4 Basic an einer Paulimot SC4

ELS3 mit Closed-Loop Stepper an einer Emco Maximat

ELS3 mit Paket Step M an Kundendrehbank
ELS4 Pro an einer Paulimot SC4

ELS4 Pro an einer Bernardo Drehmaschine

Häufig gestellte Fragen zur Funktion
Welche Zyklen kann die ELS fahren?
Aktuell sind das:
- Langdrehen Außen
- Langdrehen Innen
- Plandrehen
- Abstechen
- Automatisches Gewindedrehen außen/Innen, mit beliebiger Steigung!
- Kegelige Gewinde
- Mehrgängige Gewinde
- Kegeldrehen (Innen+Außen)
- Radius (Innen/Außen Konvex und Konkav)
- Bohren
- Rillendrehen
- Schleifen/Stoßen
- Winkelmessung
- Getriebemodus
Kann ich damit auch Zollgewinde drehen?
Ja! Jede Gewindesteigung ist möglich, in 0,001mm Schrittweiten. Man muss die Gewindesteigung also in mm umrechnen und eingeben. Der Flankenwinkel kann von 0-90° eingegeben werden. Es ist also wirklich jedes denkbare Gewinde einfach zu drehen, ohne Räderwechsel.
Was ist mit mehrgängigen Gewinden?
Ja, auch das ist möglich. Nach jedem Gewindegang dreht man das Futter im gewünschten Winkel weiter und setzt den Winkel auf 0, dann dreht man den nächsten Gang. So sind beliebig viele Gänge möglich, solange es Platz auf der Welle hat.
Gehen auch Kegelige Gewinde?
Ja, auch das ist möglich. Es kann beim Gewindedrehen auch ein Kegelverhältnis eingegeben werden. Es sind Innen- und Außenkegel möglich.
Welchen maximalen Fahrweg kann ich einstellen?
Die ELS kann bis maximal 9999,99 mm Positionen erfassen und anfahren. Bis zu 10 m lange Drehmaschinen sind also machbar ?
Wie genau kann ich die Steigung/Vorschub einstellen?
Der Vorschub ist in 0,001mm/U Schritten einstellbar.
Meine Maschine ist Typ XY von Hersteller AB, kann ich da die ELS anbauen?
Prinzipiell kann man die ELS an jede Drehmaschine anbauen, solange ein Encoder an der Spindel montierbar ist und man an der X und Z-Achse einen Schritt- oder Servomotor anbauen kann. Dabei muss man die Antriebe so auslegen, dass sie die Last auch schaffen, bei großen Maschinen ist das nicht immer einfach zu schätzen. Es wurden schon ELS an kleinen Uhrmacherdrehbänken angebaut, aber auch an einer 3-Tonnen-Maschine für das Gewindedrehen an schweren Gussteilen. Die Achsantriebe müssen Schritt/Richtungssignale annehmen können, das ist Bedingung. Manche Servosysteme können das nicht, das muss man beachten.
Kann ich auch Servomotoren anschließen?
Alle Antriebe die Schritt/Richtungssignale akzeptieren können verwendet werden. Man sollte aber darauf achten, dass der Antrieb nicht mehr als 1000 Schritte pro Motorumdrehung benötigt, manche Servoantriebe benötigen mehr Impulse, die sind dann ungeeignet bzw. würde den maximal mögliche Vorschub beschränken. Da an einer Drehmaschine aber eher langsame Bewegungen benötigt werden reichen Schrittmotoren oder Hybridservomotoren (=“Closed Loop Schrittmotor“) voll aus, Servomotoren haben keinen wirklichen Vorteil bei der Anwendung. Gerade günstige Servomotoren haben den Nachteil, dass Sie genau auf die Maschine eingestellt werden müssen, wohingegen Schrittmotoren oder Hybridservomotoren sofort fahrbereit sind.
Meine Maschine hat eine Zoll-Leitspindel, kann ich die auch verwenden?
Das geht, man muss das in mm umrechnen und kann den Wert dann als Leitspindelsteigung eingeben. Das geht bis auf 0,001mm.
Mein Motortreiber kann nur 2000 Schritte / U
Manche Schrittmotorendstufen (z.B. Beast) laufen erst ab 2000 Schritten/Umdrehung. Diese sind für die Z-Achse nicht geeignet, da sie den maximal mögliche Vorschub an der Z-Achse zu stark reduzieren würden
Kann ich auch einen Encoder Typ XX verwenden?
Prinzipiell kann man jeden Encoder nehmen der ca. 400 Impulse/Umdrehung liefert und die Signale A und B liefert. Ein Indexsignal ist nicht notwendig. Außerdem muss der Encoder mit 5V Betriebsspannung laufen und die Ausgangssignale müssen TTL 5V sein. Ideal ist es wenn er A, A/, B und B/ liefert, also differentielle Signale, dann kann man ihn ohne Leitungstreiber anschließen.
Gehen auch Baumer-Wellen-Encoder? (Hohlwellenencoder)
Da gilt das selbe: 5V TTL-Ausgang geht immer, die Impulsrate muss passen. Wichtig bei den Typen: Einbauanleitung und Abstände beachten, vor allem die Einbaurichtung ist sehr wichtig.
Wozu dient der Differentielle Leitungstreiber?
Der Treiber wandelt das Signal des AMT 103-V Encoders in ein differentielles Signal um. Dabei wird ein HIGH gleichzeitig als negiertes Signal mit übertragen, was die Störfestigkeit erhöht. Störungen, die in die Signalleitung gestreut werden, werden am Ende wieder heraus gefiltert. Man kann auch einen Encoder mit differentiellen Signalen verwenden, dann braucht man den Leitungstreiber nicht.
Das schöne am Typ AMT 103-V ist seine Einstellbarkeit, die hat man sonst nicht. Dafür benötigt er leider den Leitungstreiber.
Kann ich eine externe Bedieneinheit anschließen?
Die ELS 4 hat einen SUB-D-Anschluss für die Anbindung einer externen Bedieneinheit. Ein Fertiggerät ist in Vorbereitung, für Eigenbauten gibt es eine Adapterplatine im Shop.
Kann die ELS auch einen Frequenzumrichter ansteuern?
Die ELS 4 Pro kann einen Frequenzumrichter über eine 0-10V-Ausgang und über 2 Ausgänge für Start/Stop ansteuern. Die ELS 4 Basic hat diese Funktionen nicht.
Kann ich Glasmaßstäbe anschließen
Nein, Glasmaßstäbe oder andere Messsysteme können nicht integriert werden.
Kann die ELS mehrere Zyklen nacheinander fahren?
Nein, jeder Zyklus muss einzeln gestartet werden.
Wie stelle ich einen neuen Vorschub ein? Ich sehe keine Tastatur
Alle Einstellungen werden mit dem Drehknopf gemacht, damit stellt man sehr schnell neue Werte ein, da die Schrittweite der Eingabe angepasst wird. Der Knopf kann noch gedrückt werden und kann so kleinere Schrittweiten einstellen. Auf diese Weise dreht man sich die Werte einfach hin., was viel schneller geht als mit einer Tastatur.
Welcher maximale Vorschub ist möglich?
Der maximale Vorschub in mm/Umdrehung ist direkt gekoppelt am Verhältnis von Encoderimpulsen, Motorschritte/Umdrehung und der Vorschub der Leitspindel. Der maximale Vorschub der ELS 4 ist
Fmax = (4 x Encoderimpulse x Leitspindelsteigung) / Motorschritte
Beispiel:
Encoderimpulse: 400 Impulse/U
Motorschritte: 400 Schritte/U
Leitspindelsteigung: 4mm
Fmax = (4 x 400 x 4) / 400 = 6400/400 = 16mm / U
Selten benötigt man 16 mm/U, daher kann man in diesem Fall die Motorschritte auf 800 stellen (An der Endstufe UND an der ELS) um so einen weicheren Lauf zu bekommen und 8 mm/U als maximalen Vorschub. Erhöht man die Schrittrate des Schrittmotors, verringert man den maximalen Vorschub! Eine Untersetzung verändert den Wert entsprechend, das muss beachtet werden!
Anzustreben ist der Wert den man maximal benötigt, die meisten Dreher fahren selten über 8mm/U, da kann man dann die Anlage darauf einstellen.
Welches Linux läuft auf der ELS?
Haha, gute Frage, gar keins. Die ELS hat einen 8 bit Xmega-Controller als Computerherz eingeplanzt. Die Software ist auch nur ca. 200 KB klein. Es ist also ein sehr kleiner Controller drin, der aber durch geschickte Programmierung und einem guten Compiler sehr leistungsfähig ist.
Kann ich den Quellcode haben? Ich möchte das selbst weiter entwickeln
Nein. Es ist kein Opensource, weil es in Avrco-Pascal geschrieben ist, dessen Compiler nicht kostenlos sondern teuer ist, und den nur wenige verwenden. Avrco Pascal ist ein leistungsfähiges System abseits des C-Mainstreams, welches aber dank Pascal sehr gut für Microcontroller geeignet ist und schnellen Code erzeugt. Der Code ist sehr gut lesbar und sehr gut wartbar, und dank Pascal gibt es weniger Fallen in die man tappen kann als in C. Wie man an der ELS sehen kann lassen sich damit auch komplexe Echtzeitsteuerungen auf relativ langsamen Controllern verwirklichen.
Häufig gestellte Fragen zur Einrichtung
Ich möchte meine Achse mit einer 1:1,75 Übersetzung betreiben
Es ist nicht ratsam eine krumme Übersetzung zu wählen, es sei denn man kann damit eine „krumme“ zöllige Leitspindelsteigung zahlentechnisch begradigen, was aber selten gelingt. Generell sollten die Antriebswerte runde Zahlen ergeben, damit die Steuerung z.B. für 0,01mm Fahrweg eine genaue Anzahl an Schritten ausgeben muss. Bei krummen Werten geht das oft nicht mehr. Bei 1:1,75 werden aus einer Motorumdrehung 0,571 Leitspindelumdrehungen, ein sehr krummer Wert.
Ich möchte meine Z-Achse mit einer 1:2 Übersetzung antreiben um das Drehmoment zu verdoppeln
Das ist möglich, dabei halbiert sich aber der maximal mögliche Vorschub und die Verfahrgeschwindigkeit der Z-Achse. Empfohlen wird daher die Schrittrate des Schrittmotors nur auf 400 zu stellen damit die Einschränkung nicht zu hoch wird. Besser ist immer 1:1 , notfalls mit einem entprechend stärkeren Motor. In den Einstellungen muss man das entsprechend berücksichtigen, da der Motor nun 2x umdrehen muss für eine Spindelumdrehung muss man in der ELS die Schrittzahl des Motors verdoppeln.
Welcher maximale Vorschub ist möglich?
Der maximale Vorschub in mm/Umdrehung ist direkt gekoppelt am Verhältnis von Encoderimpulsen, Motorschritte/Umdrehung und der Vorschub der Leitspindel. Der maximale Vorschub der ELS 4 ist
Fmax = (4 x Encoderimpulse x Leitspindelsteigung) / Motorschritte
Beispiel:
Encoderimpulse: 400 Impulse/U
Motorschritte: 400 Schritte/U
Leitspindelsteigung: 4mm
Fmax = (4 x 400 x 4) / 400 = 6400/400 = 16mm / U
Selten benötigt man 16 mm/U, daher kann man in diesem Fall die Motorschritte auf 800 stellen (An der Endstufe UND an der ELS) um so einen weicheren Lauf zu bekommen und 8 mm/U als maximalen Vorschub. Erhöht man die Schrittrate des Schrittmotors, verringert man den maximalen Vorschub! Eine Untersetzung verändert den Wert entsprechend:
Ein Schrittmotor läuft falsch herum, was kann ich tun?
Man kann entweder die Wicklungsanschlüsse an der Endstufe umdrehen, oder aber man dreht die Richtung des Motors in den Einstellungen der ELS um. Letzteres ist einfacher.
Kann man den Encoder auch anders herum einbauen?
Ja, das geht, da sich die Drehrichtung des Encoders in der Steuerung unmkehren lässt um das auszugleichen
Kann ich auch einen Encoder mit mehr als 400 Impulsen pro Umdrehung verwenden?
Ja, das geht, aber man sollte dabei beachten, dass die maximale Spindeldrehzahl der ELS 3 bei 3000 U/min liegt wenn man 400 Impulse/U am Encoder verwendet. Bei 800 liegt die maximale Drehzahl dann bei nur 1500 U/min, bei 200 entsprechend bei 6000 U/min. Der Grund ist die endliche Rechenleistung des Controllers. Irgendwann kann er nicht mehr alles abarbeiten.
Wie muss ich die Impulsrate des Encoder einstellen?
Die Impulsrate des Encoder sollte auf 400 stehen. Der Encoder selbst muss auf 400 gestellt werden und die Steuerung muss ebenfalls auf 400 stehen.
Wie komme ich in den Einstellungsbereich?
Drücken Sie die Einstellungstaste (Schraubenschlüsselsymbol)
Meine Achse fährt nur halb so weit wie angezeigt, was kann ich tun?
Die Schrittrate der Schrittmotoren wird an den Endstufen mit den kleinen DIP-Schaltern eingestellt, meist 400 oder 800. Die selbe Rate muss auch in den Einstellungen der ELS eingestellt sein. Sind die Werte unterschiedlich stimmt die Fahrstrecke später nicht.
Grundsätzlich müssen also die an der Hardware (Encoder, Schrittmotorendstufen) eingestellten Werte auch so in die Einstellungen der ELS übernommen werden.
Die angezeigte Drehzahl stimmt nicht
In diesem Fall ist die Einstellung des Encoders bzw. die Encodereinstellung in der Steuerung nicht korrekt.
Die Einstellung der Impulsrate des Encoders in der Steuerung muss immer mit der realen Impulsrate pro Spindelumdrehung übereinstimmen!
Wird ein Encoder mit 400 Impulsen / Umdrehung eingesetzt muss die Einstellung in der ELS auch auf 400 stehen. Ist eine 2:1 Übersetzung am Encoder muss die Einstellung auf 800 stehen, da der Encoder sich bei jeder Spindelumdrehung ja 2x dreht und daher 2×400 Impulse abgibt.
Sie haben Fragen zu dieser Steuerung? Dann helfen wir gerne!
Häufig gestellte Fragen und Antworten zur ELS finden Sie auf der Infowebsite.
Sie können uns auch per Email erreichen:
anfrage@rocketronics.de
Lieber per Whatsapp?
04281 5079782
Oder rufen Sie uns an:
04281 5079782 von 14:00 - 18:00
Louis Schreyer
Böttcherstr. 2
27404 Zeven
Germany
Tel: 04281 5079782
gprs@rocketronics.de
Passendes Zubehör
Kunden kaufen auch
Fragen & Antworten zum Einkauf
Kann ich als Gast bestellen?
Ja! Sie benötigen kein Kundenkonto.
Sie können als Gast bestellen ohne ein Konto anzulegen, das ist bei uns voreingestellt. Nur wenn Sie möchten können Sie auch ein Konto anlegen.
Sie können auch im Warenkorb direkt mit Paypal oder Amazon bezahlen, dann müssen Sie gar keine Daten eingeben.
Alternativ können Sie sich auch ganz einfach mit Ihren Amazon-Konto bei uns anmelden. Wir erhalten dabei aber nicht Ihre Amazon-Zugangsdaten sondern im Bestellfall nur Ihre Anschrift für den Versand. Die Eingabe der Daten erfolgt auf einer Amazon-Seite, die hier im Shop nur eingeblendet wird. Die Eingaben werden zu 100% von Amazon über eine verschlüsselte Verbindung verarbeitet.
Wie kann ich bezahlen?
Wir bieten eine große Palette von Zahlungarten an:
- Paypal
- Vorkasse
- Sofortüberweisung
- Kreditkarten (Visa, Mastercard, Amex)
- Klarna Rechnung (Nur Privatkunden)
- Billie Rechnung (Nur Unternehmen)
- Offene Rechnung für uns bekannte Unternehmen und Institute
- Amazon Pay
- Apple Pay
- Google Pay
- eps für Österreich.
Alle Zahlungen werden von sicheren namhaften Dienstleistern verarbeitet, Ihre Zahlungsdaten sind sicher SSL-verschlüsselt.
Wir liefern auf offene Rechnung auch an uns bekannte große Unternehmen, Hochschulen und Institute. Wir behalten uns dort aber vor eine Lieferung auf Rechnung abzulehnen.
Kann ich auf Rechnung kaufen?
Ja, als Privatkunde können Sie mit Klarna auf Rechnung kaufen. Voraussetzung ist dass Rechnungs- und Lieferadresse identisch sind und im "Firma"-Feld nichts eingetragen ist.
Als und bekanntes Unternehmen, Institut oder Hochschule können Sie auch die Zahlungsart "Offene Rechnung" wählen, wir liefern dann auf Rechnung mit 14 Tagen Zahlungsziel. Privatkunden können wir nicht direkt auf offene Rechnung beliefern, wir bitten da um Verständnis.
Gibt es einen Mindestbestellwert?
Nein
Ab welchem Betrag liefern Sie versandkostenfrei?
Nach Deutschland liefern wir ab 50 Euro Artikelwert versandkostenfrei!
Wie hoch sind die Versandkosten?
Die Versandkosten berechnen sich nach Gewicht.
Wenn Sie Ihre gewünschte Ware in den Warenkorb legen sehen Sie dort die Versandkosten für Ihre Bestellung. Auf Wunsch können Sie dort auch das Lieferland wechseln.
Nach Deutschland liefern wir ab 50 Euro Artikelwert versandkostenfrei!
Kann ich Artikel auch zurücksenden?
Wir gewähren auf alle Artikel 30 Tage Rückgaberecht. Senden Sie uns die Ware bei Nichtgefallen einfach zurück, wir schreiben den Betrag dann sofort gut sofern der Artikel nicht verwendet wurde. Gern helfen wir auch vorab um Unklarheiten zu beseitigen, das ist manchmal besser als gleich zurück zu senden.
Sehen Sie dazu auch auf unser Widerrufsrecht an.
Kann ich mit EU Ust.-ID umsatzsteuerfrei einkaufen?
Ja, Sie können als Europäischer Kunde bei den Kundendaten auch eine EU USt-IdNr. angeben, dann wird Ihnen keine Umsatzsteuer berechnet, die Preise werden dann steuerfrei angezeigt. Dies gilt nicht für Kunden mit Lieferland Deutschland. Alle Länder außerhalb Europas werden automatisch Umsatzsteuerfrei beliefert.
Wie kann ich Sie erreichen?
Sie können uns ganz einfach per Telefon, Whatsapp und Email erreichen:
Hotline: +49 (0)4281 50 79 78 2 (Mo-Fr. 14-18:00)
Whatsapp: +49 (0)4281 50 79 78 2
E-Mail: info@rocketronics.de
Qualität und schnelle Lieferung
Unser Unternehmen sammelt über den unabhängigen Dienstleister SHOPVOTE Bewertungen. SHOPVOTE setzt automatische und manuelle Maßnahmen ein, um Bewertungen zu verifizieren. Informationen zur Echtheit von Kundenbewertungen auf SHOPVOTE finden Sie hier.
Hier sind die Vorteile von Rocketronics




Über Rocketronics
 Rocketronics wurde in 1999 als Familienbetrieb von Louis Schreyer gegründet. Als Ingenieur für Mikroelektronik entwerfe ich Hardware und entwickele auch die Software dazu.
Rocketronics wurde in 1999 als Familienbetrieb von Louis Schreyer gegründet. Als Ingenieur für Mikroelektronik entwerfe ich Hardware und entwickele auch die Software dazu.
Neben der Herstellung von Steuerungen betreiben wir auch Handel mit den nötigen Komponenten. Als Händler verfügen wir über ein umfangreiches Lager an Komponenten für den Maschinenbau und die Automatisierung, die wir in diesem Shop anbieten. Unsere Lieferanten sind die Originalhersteller, bei uns kaufen Sie geprüfte Markenware.
Wir beraten Sie auch wenn es um die Auswahl der richtigen Komponenten geht. Wir haben viel Erfahrung in dem Bau und den Betrieb von CNC-Fräsen und Drehmaschinen. Wir können Ihnen helfen wenn Sie Fragen haben, sei es zur Steuerung, der Auswahl der Antriebe oder allgemein zum Bau von CNC-Fräsen und dem Umbau von Drehmaschinen. Sie können uns ganz einfach per Telefon, Whatsapp und Email erreichen:
Hotline: +49 (0)4281 50 79 78 2 (Mo-Fr. 14-18:00)
Whatsapp: +49 (0)4281 50 79 78 2 (kein Telefon)
E-Mail: info@rocketronics.de
Achtung: Keine Beratung und Hilfestellung für Teile die nicht bei uns gekauft wurden.
Mehr Infos zu Rocketronics finden Sie auf der Über Uns-Seite
merçi beaucoup français serais super néanmoins j'ai réussi à traduire
merçi beaucoup
Zur Rezension